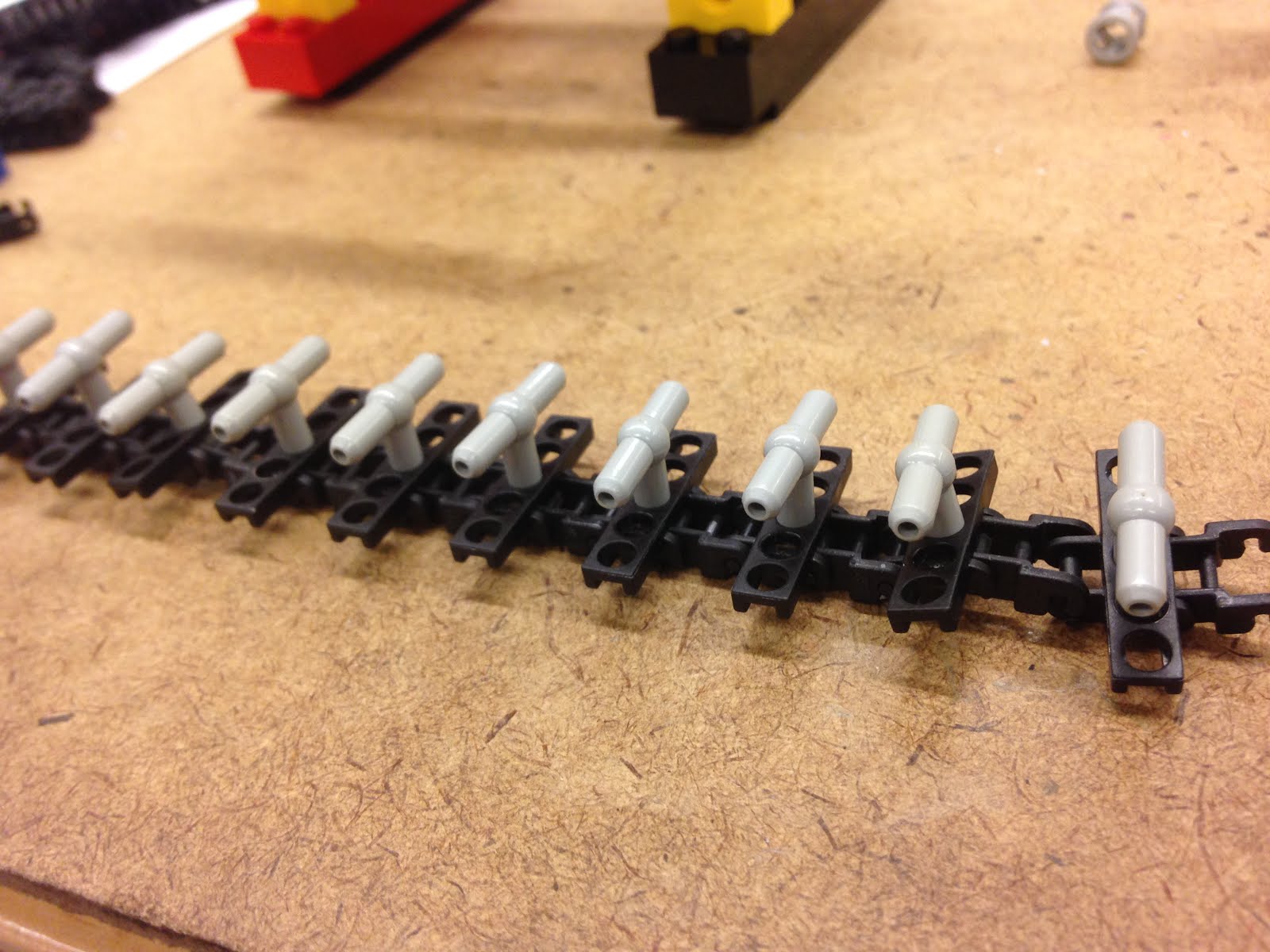



We made many iterations of the part surrounding the tracks but after hours of work, we ended up with these two that both worked well. The one on the left is stair like on the inside while the one on the right is more like a chimney.


With our tube finally here, we cut the 6 foot long tube into 12 6 inch long tubes. We first measured and marked the huge tube using a ruler and an erasable marker and then cut it using the power saw. Nearly all of the tubes were about the same height except for one which was clearly not as tall as the rest but we probably do not need all of 12 of the tubes so we're all good.


With the tubes and marbles finally here, we finally tested if the light sensor would be able to distinguish between an empty tube and a tube with marbles. With the more colored marbles, the light sensor worked great but it was a bit iffy with the yellow and white marbles. I found that the light sensor found a clear tube to have a value of 95, white marbles in the tube to be a value of 93/94, and yellow marbles to be around 91/92. The red, blue, green, and black marbles all came in at a much lower value. Since a clear tube had a light sensor value of 95, we said that if the light sensor value is greater than or equal to 95, turn on motor 1 but if it is less than 95 turn on motor 2 and motor 3.Once we installed the light sensor to the marble releasing mechanism though the values changed and we found that a value of 75 worked much better.
A major problem we encountered this week was us realizing that the bricktronics shield only had two ports for motors. So we had to try to figure out a way for one motor to move both the top and bottom tube holders. This really stumped us. First we thought of using a chain of gears climbing up but that idea was never executed since it just seemed to be too complicated. We then thought of building a contraption that would have the two top and bottom platforms to be connected to each other. We tried building this idea and it seemed like it would work but then we thought of using 3 servo motors. We tried coding the motors to move from position 0 to position 30 pause for 1 second and then move from position 31 to 60 and so forth until it reached position 180 and then it would go back to 0. This worked but not very well. It barely moved the tracks. We then thought about perhaps connecting a motor to a sensor port and writing in the code that motor 3 was in a sensor port. This did not work. We looked up if there were bricktronics that could hold more than 2 motor ports and we found that those were available. I thought that we would have one in the room so I went hunting for it and found it on the table in the back. But while we were asking Amy if we could use it, we also realized that we could connect the top and bottom tubes using a really long stick. After hours of thinking and building we finally found an answer!
We found that as the marbles were emptied from the tubes and into the marble releasing mechanism, 6 marbles would fall into the structure but they would be below the light sensor so the sensor could not sense that they were there and it would read that there was an empty tube, stop and the other motor that shifts the tubes would turn on. We fixed this by writing in the code that we would run the function releasemarble (makes the motor turn on for half second to turn the track and let one marble out) 6 times and then shift the tubes whenever the light sensor sensed that there were no marbles in front of it.
We then had to tackle the problem of how to attach the tubes to the tracks. We found velcro strips in the room and decided that we would hot glue them to the tracks and the tubes. This seemed like a fairly easy idea but we found out that this was totally not the case. We spent about 3 hours trying to successfully execute this idea and it's still in the works.



We first hot glued the the whole strip to the tracks but once we tried having the tracks run, it broke! We found that this was because the tracks became shorter as it curved on the gear. We thought that perhaps first gluing the tracks on flat on the table would work but it did not. We also tried gluing the velcro on the tracks but having a bit of extra velcro so that hopefully as the track curved on the gears there'd be enough velcro on the straight parts that it wouldn't break. This idea worked for one run and then broke. We then figured that gluing little sections of velcro would be the best. This worked the best out of all of our ideas but it still beaks so hopefully next week we can figure out how to fix this problem.
We also made a little funnel made out of paper cones so that the marbles being released could go straight into the tube down below it.
As we ran the tracks with the tubes connected to them we found that the tubes' bottom would get stuck on the raised parts of the lego so to fix this temporarily we placed paper on top of the lego platform.
Next week, we have to figure out a a different way to attach the tubes to the tracks. We're thinking of either just directly using the velcro strips as the track going around the gears but we'd have to create friction for it so that it would actually turn with the gears. We're also thinking of using headbands and sewing it to the tracks and then gluing the velcro strips on top of the headband.
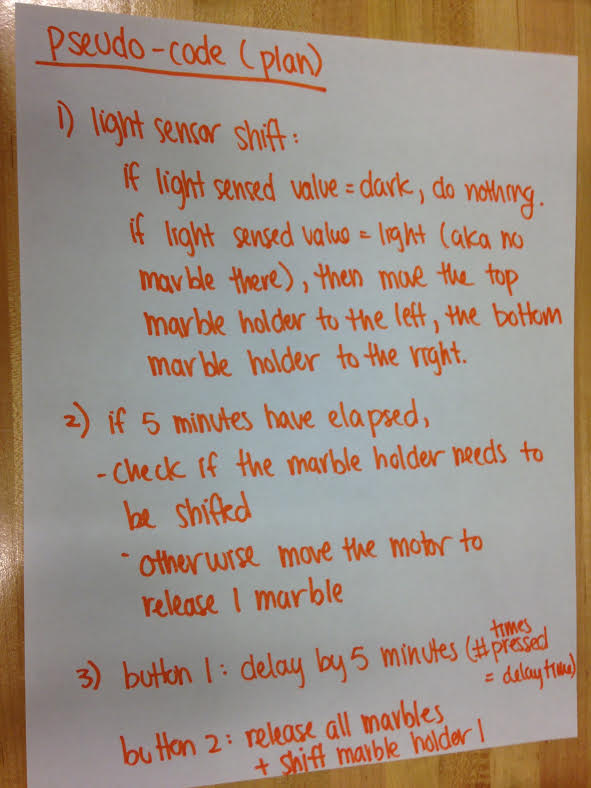
We also have to create the platform out of delrin so that it would be smooth and the tubes won't catch on it. Since the tubes are wobbly by themselves, we were thinking of moving the tracks higher so that the velcro could be higher and also maybe creating a structure that will work similarly to the paper in the video holding the tubes upright. We also have to add two buttons to the whole thing somewhere and write a code that says that if one of the buttons is pressed, there'd be a delay of 5 min and if the other button is pressed, it would fast forward 5 min.










 =
= 




































{kind=link}
{kind=link}